-

-
Physique Chimie
Mouvement de rotation d’un solide autour d’un axe fixe
2ème année bac Sciences Physiques Physique Chimie 2 bac Mouvement de rotation d’un solide autour d’un axe fixe fiche de cours
Solide en mouvement de rotation
تعريف
Un solide possède un mouvement de rotation autour d'un axe fixe si le mouvement de chacun de ses points est un cercle centré sur l'axe de rotation.
Les caractéristiques du mouvement rotationnel
Tous les points du solide situés sur l’axe de rotation sont immobiles tous les autres points du solide décrivent des arcs de cercle centrés sur l’axe de rotation. Donc chaque point d’un solide en rotation autour d’un axe fixe a une trajectoire circulaire.
Abscisse angulaire et abscisse curviligne
تعريف
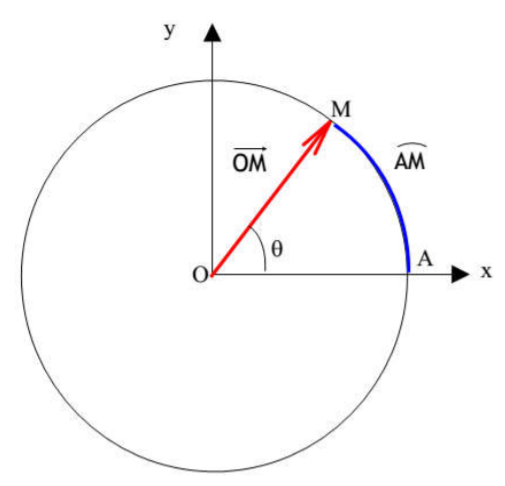
La position d’un point M d’un solide (S) en rotation autour d’un axe fixe ($$\Delta$$) est repérée, à chaque instant t, par son abscisse angulaire ou par son abscisse curviligne
Abscisse angulaire
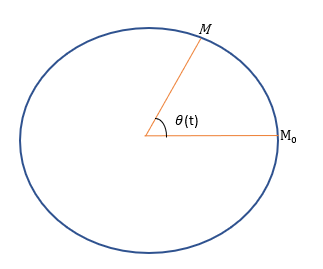
On peut aussi repérer la position du mobile sur le cercle trajectoire par la donnée de l'angle θ(t) orienté au centre du cercle : $$\theta(\mathrm{t})=\left(O \widehat{M_{0} ; O M}\right)$$, l’unité de l’abscisse angulaire est le radian (rad)
Abscisse curviligne
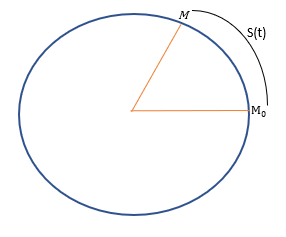
Soit M un point quelconque choisi sur le cercle trajectoire. On oriente la trajectoire dans un sens arbitraire, la position du mobile est repérée par son abscisse curviligne : $$\mathrm{s}(\mathrm{t})=\widehat{\mathrm{M}_{0} \mathrm{M}}$$, l’unité de l’abscisse curviligne est le mètre (m)
Relation entre abscisse curviligne et abscisse angulaire
Il existe une relation géométrique simple entre abscisse curviligne et abscisse angulaire : $$s(t)=R . \theta(t)$$ tel que R le rayon de la trajectoire circulaire
Vitesse angulaire et vitesse linéaire
Vitesse angulaire
Vitesse angulaire Moyenne
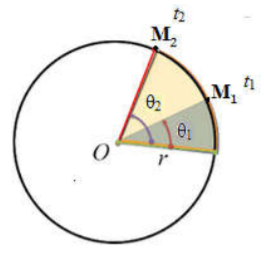
Soit M un point du solide décrit un mouvement circulaire centré sur l’axe ($$\Delta$$) de centre O
- à l’instant $$\mathrm{t}_{1}$$ la position du point M est noté $$\mathrm{M}_{1}$$
- à l’instant $$\mathrm{t}_{2}$$ la position du point M est noté $$\mathrm{M}_{2}$$
Au cours de la durée $$\Delta \mathrm{t}=\mathrm{t}_{2}-\mathrm{t}_{1}$$ le point M parcours l’arc $$\widehat{M_{1} M_{2}}$$ et le solide tourne d’un angle $$\Delta \theta=\theta_{2}-\theta_{1}$$
On appelle vitesse angulaire moyenne le quotient de l'angle $$\theta_{2}-\theta_{1}$$ dont a tourné le point M par le temps $$\mathrm{t}_{2}-\mathrm{t}_{1}$$ mis pour effectuer cette rotation Par définition la vitesse angulaire moyenne du point M est donnée par la relation :
$$\dot{\theta}=\frac{\theta_{2}-\theta_{1}}{t_{2}-t_{1}}$$
Unité de la vitesse angulaire dans SI : rad/s
Vitesse angulaire instantané
La vitesse angulaire instantanée d'un solide à la date t se définit comme la vitesse angulaire moyenne du solide pendant une brève durée autour de la date t.
$$\dot{\theta}=\frac{\theta_{2}-\theta_{1}}{t_{2}-t_{1}}=\frac{\Delta \theta}{\Delta t}$$
La vitesse angulaire \omega est la même pour tous les points du solide en rotation et qui est donc la vitesse angulaire du solide en rotation
Vitesse linéaire
La vitesse linéaire du point M à l’instant t est le quotient de la longueur de l’arc $$\widehat{M_{1} M_{2}}$$ de son parcours par la durée Δt correspondante :
$$v_{\mathrm{t}}=\frac{\mathrm{M}_{1} \mathrm{M}_{2}}{\mathrm{t}_{2}-\mathrm{t}_{1}}$$
Relation entre la vitesse linéaire et la vitesse angulaire
Pour un point M d’un solide en rotation autour d’un axe fixe, situé à une distance r de l’axe de rotation, la distance parcourue pendant une durée $$\Delta \mathrm{t}=\mathrm{t}_{2}-\mathrm{t}_{1}$$ est $$\mathrm{M}_{1} \mathrm{M}_{2}$$ avec $$\Delta \mathrm{s}=\mathrm{M}_{1} \mathrm{M}_{2}=\mathrm{r} \cdot \Delta \theta$$
On a
$$v_{\mathrm{t}}=\frac{\mathrm{M}_{1} \mathrm{M}_{2}}{\mathrm{t}_{2}-\mathrm{t}_{1}}=\frac{\mathrm{r} \cdot \Delta \theta}{\mathrm{t}_{2}-\mathrm{t}_{1}}=\mathrm{r} \cdot \frac{\Delta \theta}{\Delta \mathrm{t}}$$
Et comme $$\frac{\Delta \theta}{\Delta \mathrm{t}}=\dot{\theta} \text { alors } v=\mathrm{r} \cdot \dot{\theta}$$
Accélération angulaire
تعريف
L’accélération angulaire est la dérivée de la vitesse angulaire par rapport au temps $$\ddot{\theta}=\frac{d \dot{\theta}}{d \mathrm{t}}$$ son unité dans le système international est $$\text { rad. } s^{-2}$$
Le vecteur accélération dans la base de Frenet
$$\overrightarrow{\mathrm{a}}=\mathrm{a}_{\mathrm{t}} \overrightarrow{\mathrm{u}}+\mathrm{a}_{\mathrm{n}} \overrightarrow{\mathrm{n}}=\frac{d \mathrm{v}}{d \mathrm{t}} \overrightarrow{\mathrm{u}}+\frac{\mathrm{v}^{2}}{\mathrm{r}} \overrightarrow{\mathrm{n}}$$
Avec
$$\mathrm{a}_{\mathrm{t}}=\frac{d \mathrm{v}}{d \mathrm{t}} \text { et } v=\mathrm{r} \cdot \dot{\theta} \text { Alors } \mathrm{a}_{\mathrm{t}}=\frac{d(\mathrm{R} \cdot \dot{\theta})}{d \mathrm{t}} \text { donc } \mathrm{a}_{\mathrm{t}}=\mathrm{r} \cdot \frac{d(\dot{\theta})}{d \mathrm{t}}=\mathrm{r} \cdot \ddot{\theta}$$
$$\mathrm{a}_{\mathrm{n}}=\frac{\mathrm{v}^{2}}{\mathrm{r}} \text { et } \mathrm{v}=\mathrm{r} . \dot{\theta} \text { Alors } \mathrm{a}_{\mathrm{n}}=\frac{(\mathrm{r} \cdot \dot{\theta})^{2}}{\mathrm{r}} \text { donc } \mathrm{a}_{\mathrm{n}}=\mathrm{r} . \ddot{\theta}^{2}$$
Relation fondamentale de la dynamique
لمواصلة هذا الملخص، قم بالتسجيل بالمجان في كيزاكو

- ملخصات الدروس غير محدودة
- فيديو مجاني في كل درس
- تمرين مصحح مجاني
- اختبار تفاعلي