-

-
Sciences de l'ingénieur
Chaîne d'information
2ème année bac Sciences Math B SI Chaîne d'information fiche de cours
Fonction acquérir
Situation
En parallèle avec la chaîne d’énergie, qui constitue une concrétisation de la partie opérationnelle d’un système quelconque, s’ajoute la chaîne d’information qui s’occupe du traitement des informations nécessaires en entrée et en sortie pour assurer un bon "monitoring" du fonctionnement du produit/système. La partie acquérir s’occupe de recevoir les données de contrôle et l’information d’entrée pour l’envoyer ensuite vers les fonctions traiter et communiquer.
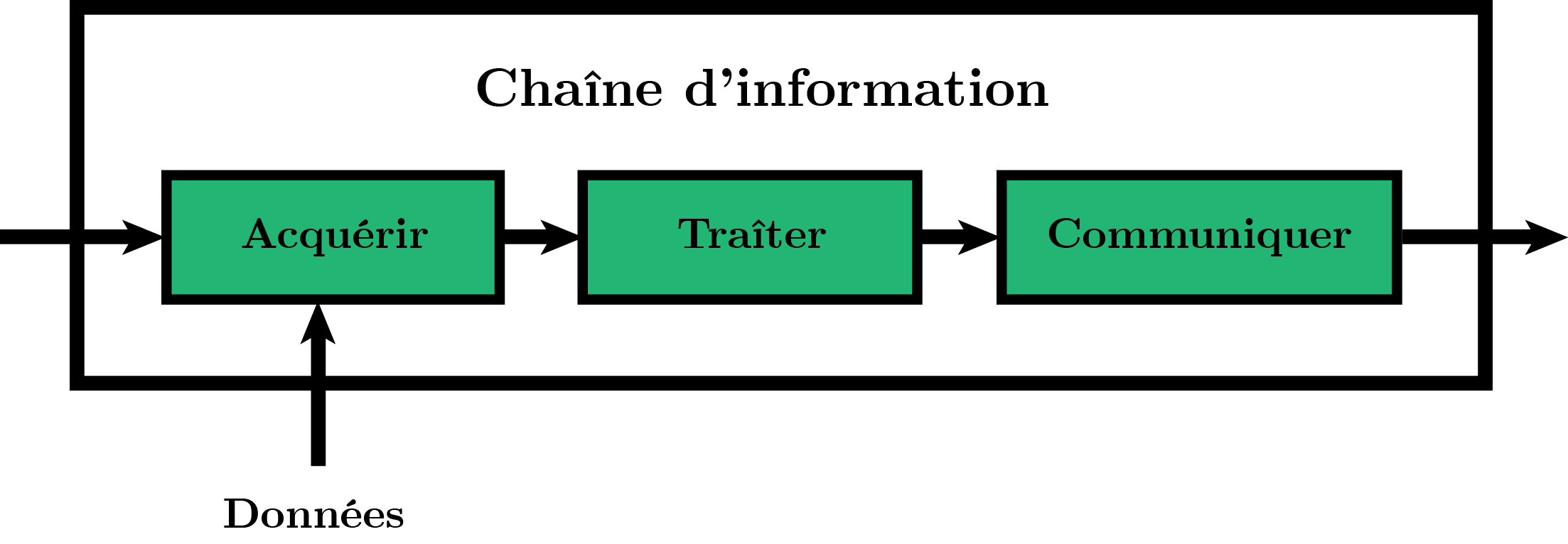
Chaîne d’information
تعريف
En général, l’acquisition se fait en effectuant une image de la grandeur physique. Cette opération s’appelle le captage et se fait au moyen de capteurs ou détecteurs. Quant à la grandeur physique, celle-ci peut être une position, une vitesse, une accélération, une pression, une force, une température, une déformation, une contrainte, une intensité lumineuse, une vibration, une concentration chimique, de l’humidité etc.
Un exemple typique pour comprendre la chaîne d’information peut être un thermomètre électronique : la sonde de température détecte la température (acquérir), l’information sur la température est traitée par une puce électronique (traiter) et la température est affichée dans un afficheur LCD électronique (communiquer).
Analyse fonctionnelle de la fonction Acquérir
SADT
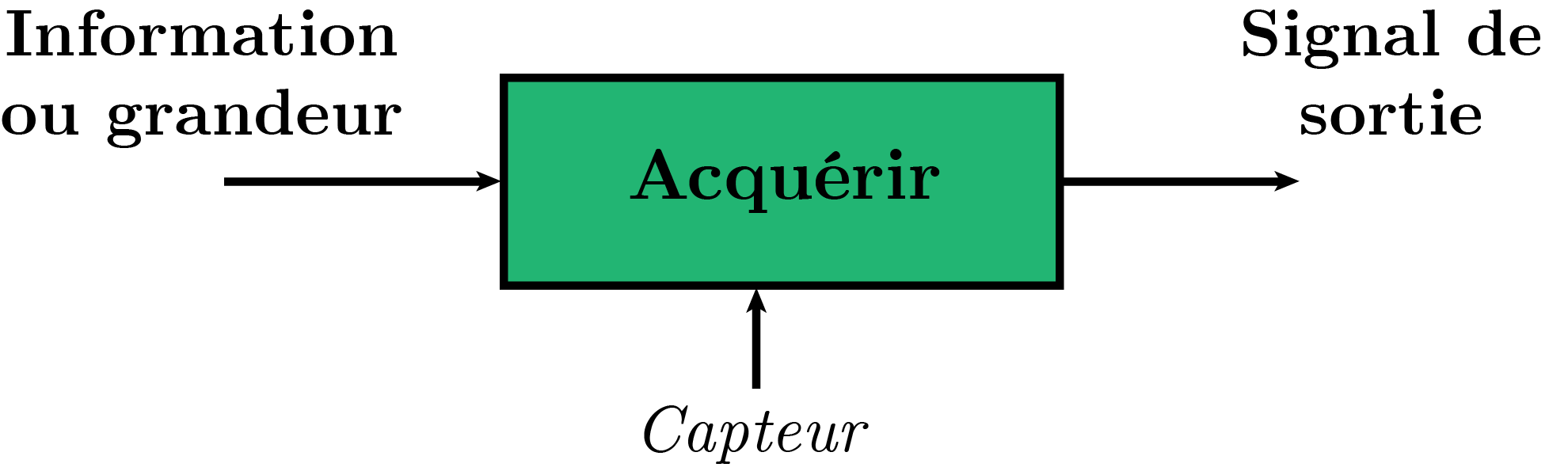
SADT A-0 de la fonction Acquérir
Le détail le plus important à retenir ici est la nature du signal de sortie, celle-ci peut être classifiée selon trois types :
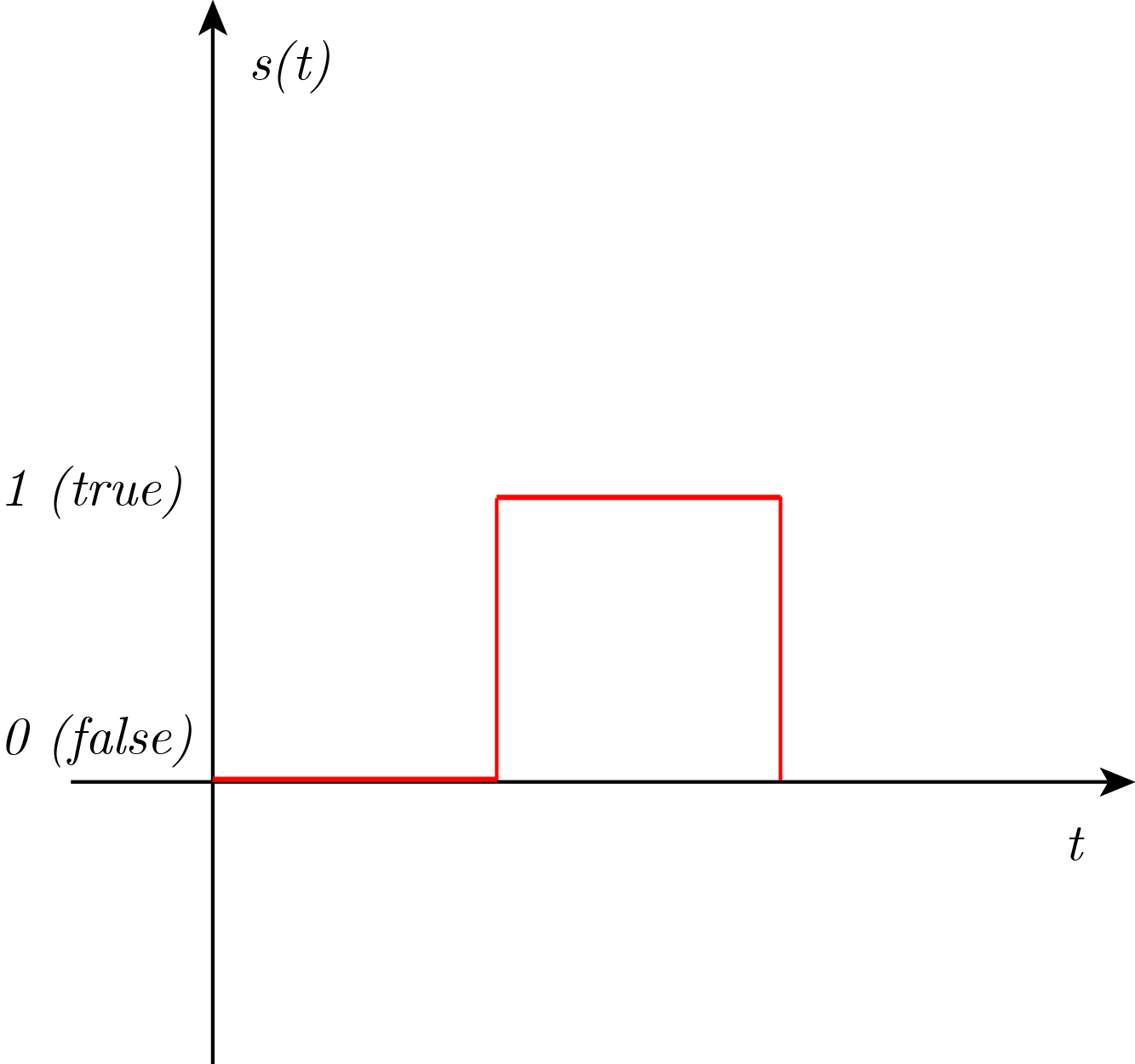
- Signal logique : La variable de sortie est de type Vrai/Faux, 1/0, I/O, on/off (ampoule électrique, voyant d’écran de télévision).
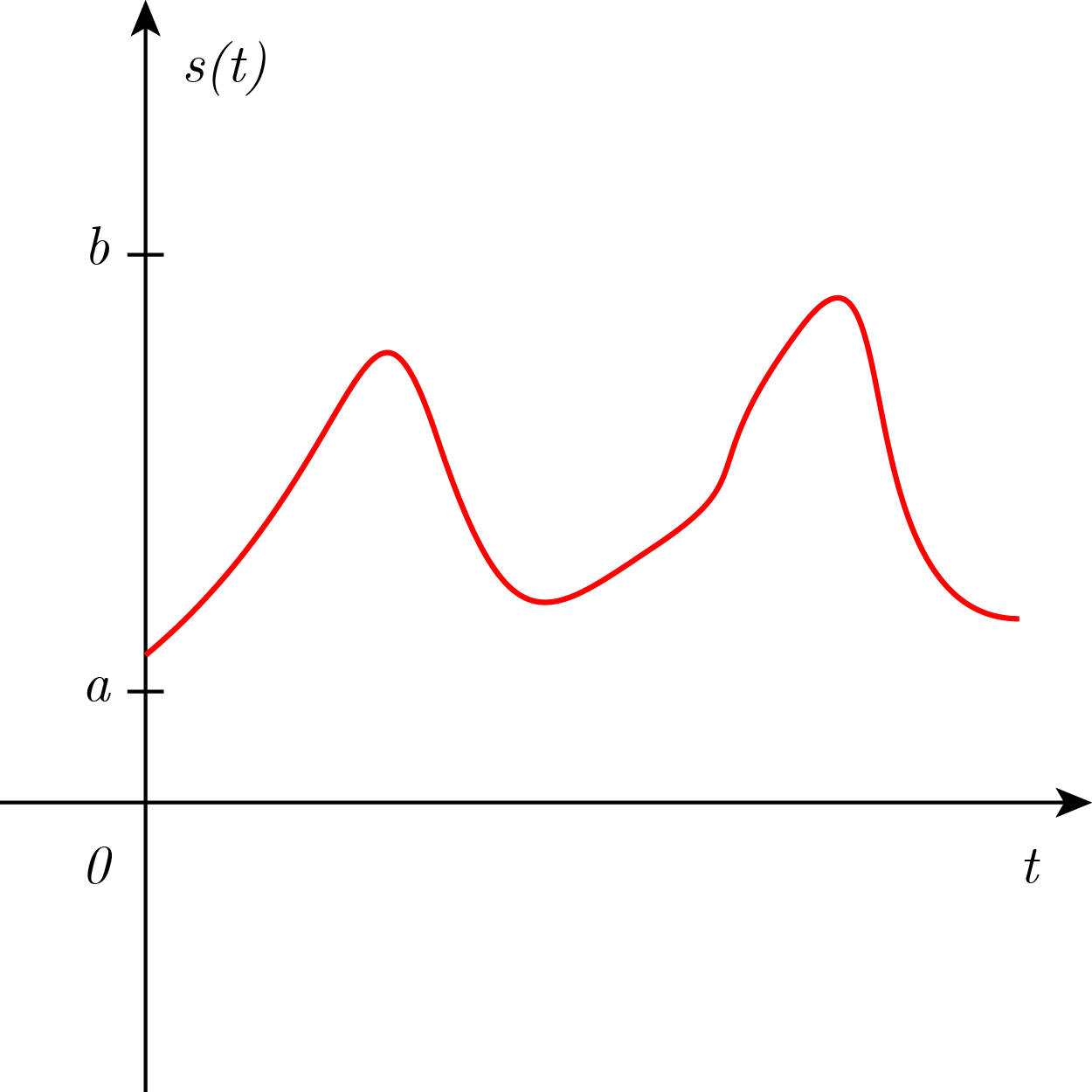
- Signal analogique : La variable de sortie est contenue dans un intervalle continu [a,b] (température d’un four électrique classique : [0deg,250deg]).
- Signal numérique : Ou signal digital, où la variable de sortie est échantillonnée : au lieu de parcourir un intervalle continu, elle prend une des n valeurs sur un intervalle discret {s0...sn}( le contrôle du volume d’un smartphone est échelonné entre 0 et 10 par exemple).
A REa
ما يجب معرفته
L’acquisition est l’action de saisie et conditionnement d’une information ou grandeur physique reçue en entrée (signal).
- Signal logique : La variable de sortie est de type Vrai/Faux, 1/0, I/O, on/off (ampoule électrique, voyant d’écran de télévision).
- Signal analogique : La variable de sortie est contenue dans un intervalle continu [a,b] (température d’un four électrique classique : [0"deg",250"deg"]).
- Signal numérique : Ou signal digital, où la variable de sortie est échantillonnée : au lieu de parcourir un intervalle continu, elle prend une des n valeurs sur un intervalle discret {s_0...s_n}( le contrôle du volume d’un smartphone est échelonné entre 0 et 10 par exemple).
Les capteurs
Les capteurs, d’après ce qui a été mentionné précédemment, sont les dispositifs qui permettent l’acquisition des données du milieu extérieur. Ils sont classifiés selon un ensemble de critères qui vont être explicités comme suit.
Classification des capteurs
Il existe deux classifications de capteurs : une selon le type de signal et une autre selon l’apport énergétique du capteur.
Classification selon le type de signal
Il existe trois types de capteurs dans cette configuration :
- Les capteurs logiques : appelés détecteurs, qui détectent l’existence (ou l’absence) d’un signal, sans information sur sa grandeur.
- Les capteurs analogiques : des capteurs proprement dits, ceux-ci fonctionnent sur tout un intervalle continu de valeurs possibles, avec généralement une relation de proportionnalité entre de signal capté et l’information de sortie.
Classification selon l’apport énergétique
Dans cette catégorie, il existe deux types de capteurs :
- Les capteurs passifs : Nécessitent un apport d’énergie de l’extérieur afin de fonctionner. Un capteur passif, s’il est électrique, est modélisé par une impédance Z_. Cela veut dire que si on veut un signal à la sortie du capteur, il faut un signal d’entrée.
- Les capteurs actifs : Un capteur est actif lorsque celui-ci ne nécessite pas un apport d’énergie pour fonctionner, l’apport en énergie est auto-assuré.
Propriétés générales d’un capteur
Les caractéristiques d’emploi d’un capteur sont la définition même de celui-ci, le choix d’un capteur ou un autre pour effectuer une opération dépend non seulement du type de grandeur physique ou information mesurée mais aussi des spécificités techniques désirées vis-à-vis d’un capteur. On recense ici les caractéristiques d’un capteur :
- La précision : Plus un capteur est précis, plus la valeur mesurée s’approche de la valeur théoriquement vraie. La précision dépend de la résolution du capteur
- La résolution : Il s’agit de la plus petite variation de grandeur avec laquelle fonctionne un capteur (un capteur de vitesse de résolution 0.1m/s n’affichera jamais une valeur de 2.22m/s par exemple).
- Sensibilité : Il s’agit de la vitesse à laquelle le capteur change de mesure suite à une fluctuation rapide de la grandeur mesurée.
- Etendue : Il s’agit de l’intervalle de mesure du capteur.
- Linéarité : Un capteur est linéaire si la relation entre l’entrée et la sortie est linéaire et/ou une équation différentielle linéaire.
- Rapidité : Il s’agit de l’aptitude à délivrer une valeur de mesure stable et de suivre les variations de la grandeur à mesurer.
Les capteurs logiques
Les capteurs logiques (ou capteurs T.O.R, ou détecteurs) sont des capteurs qui fournissent l’information sur la présence ou l’absence d’une grandeur, sans détailler sa valeur. Pour un détecteur, la grandeur soit existe ou non. Ce chapitre détaille deux types de détecteurs.
Détecteurs de position
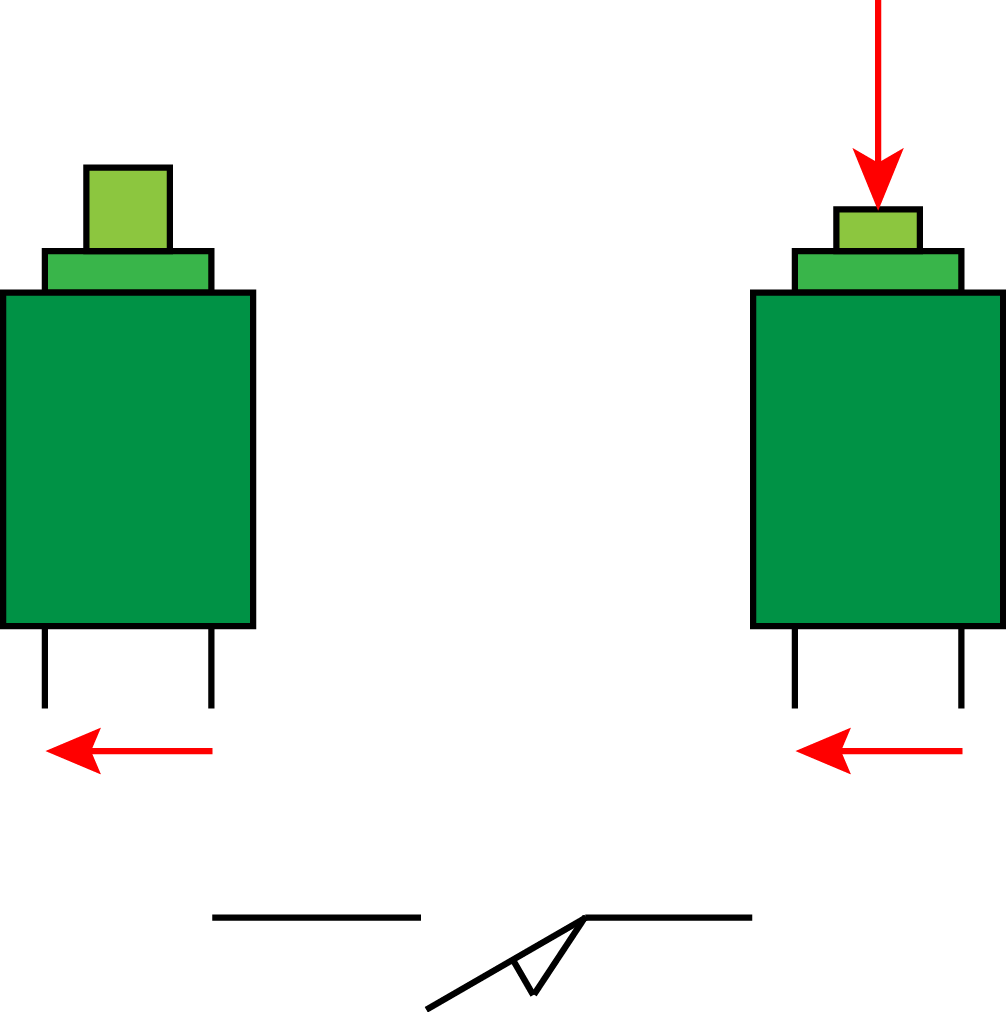
Détecteur de position.
Les détecteurs de position électromécanique sont des interrupteurs qui transmettent un signal électrique à la partie commande une fois qu’un obstacle appuie sur l’interrupteur
Détecteurs de proximité
Les détecteurs de proximité sont des détecteurs qui émettent des signaux électriques à la partie commande un fois qu’un objet ou obstacle pénètre dans la zone de détection du détecteur. Il existe 4 types de capteurs de proximité qui diffèrent par leur fonctionnement interne et typologie d’objets détectés.
- Détecteur inductif : Il s’agit d’un circuit LC (bobine/capacité) dont l’amplitude du signal change lorsqu’un objet métallique est détecté.
- Détecteur capacitif : Il s’agit d’un circuit condensateur dont la capacité C change lorsqu’un objet quelconque est détecté.
- Détecteur magnétique : Il s’agit d’un interrupteur à lame souple qui se ferme au passage d’un objet magnétique.
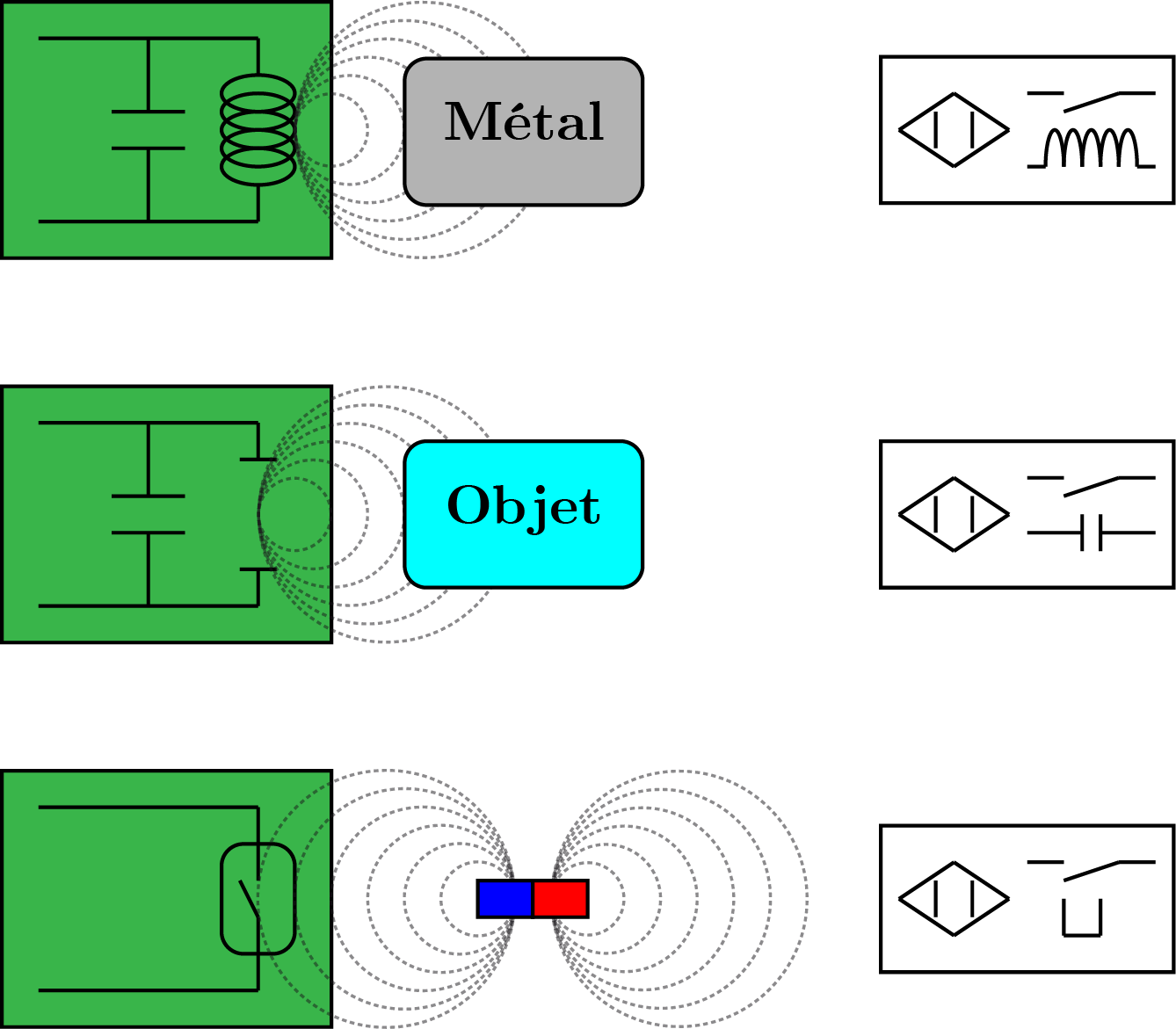
Détecteurs de proximité, de haut vers le bas : Capteur inductif, capteur capacitif, capteur magnétique.
Détecteurs photoélectriques
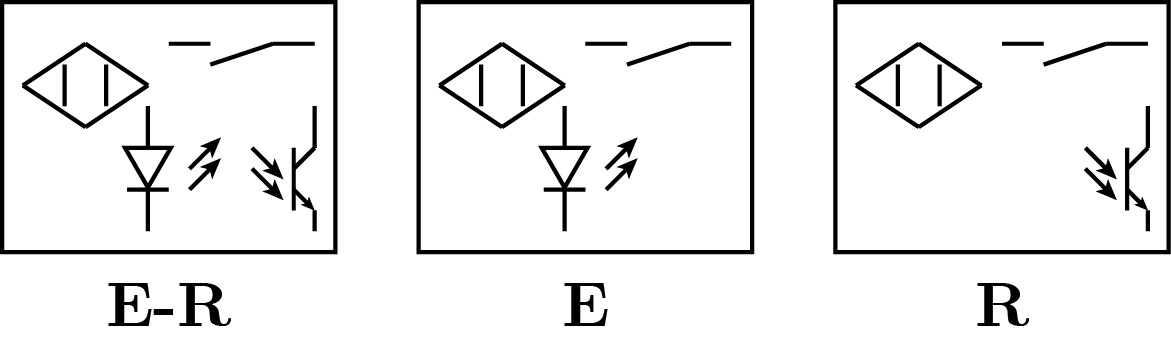
Photodiodes, de gauche à droite : Emetteur-récepteur, émetteur, récepteur.
Cette typologie est différente dans la mesure où elle fait appel à deux composants; un émetteur qui lance un signal lumineux, et un récepteur qui est sensé capter celui-ci. On admettra donc que l’objet est détecté où selon la configuration des composants photoélectriques, moyennant une des variantes suivantes :
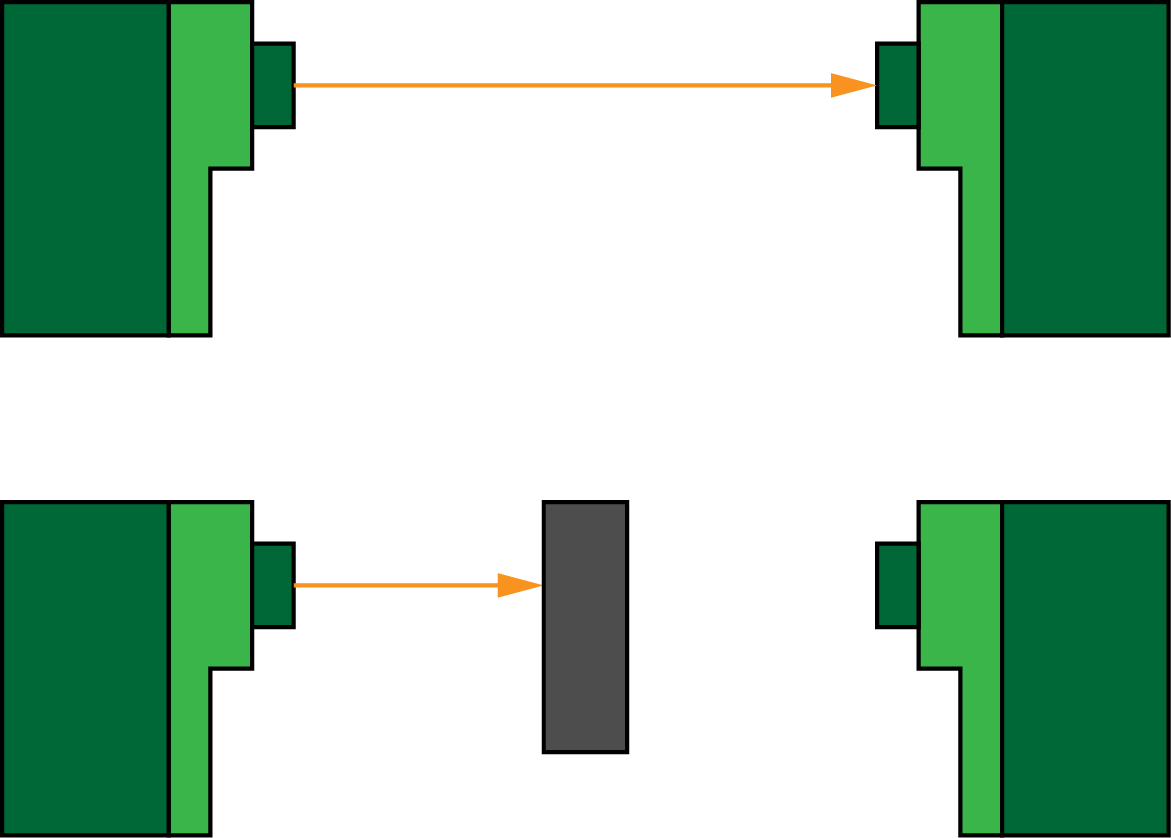
Système barrage : Constitué de 2 boitiers, peut travailler à une portée de 30m, ne fonctionne pas sur les objets transparents.

Système réflex : Constitué d’un boitier E-R, peut travailler à une portée de 15m, ne fonctionne pas sur les objets transparents et réflechissants.
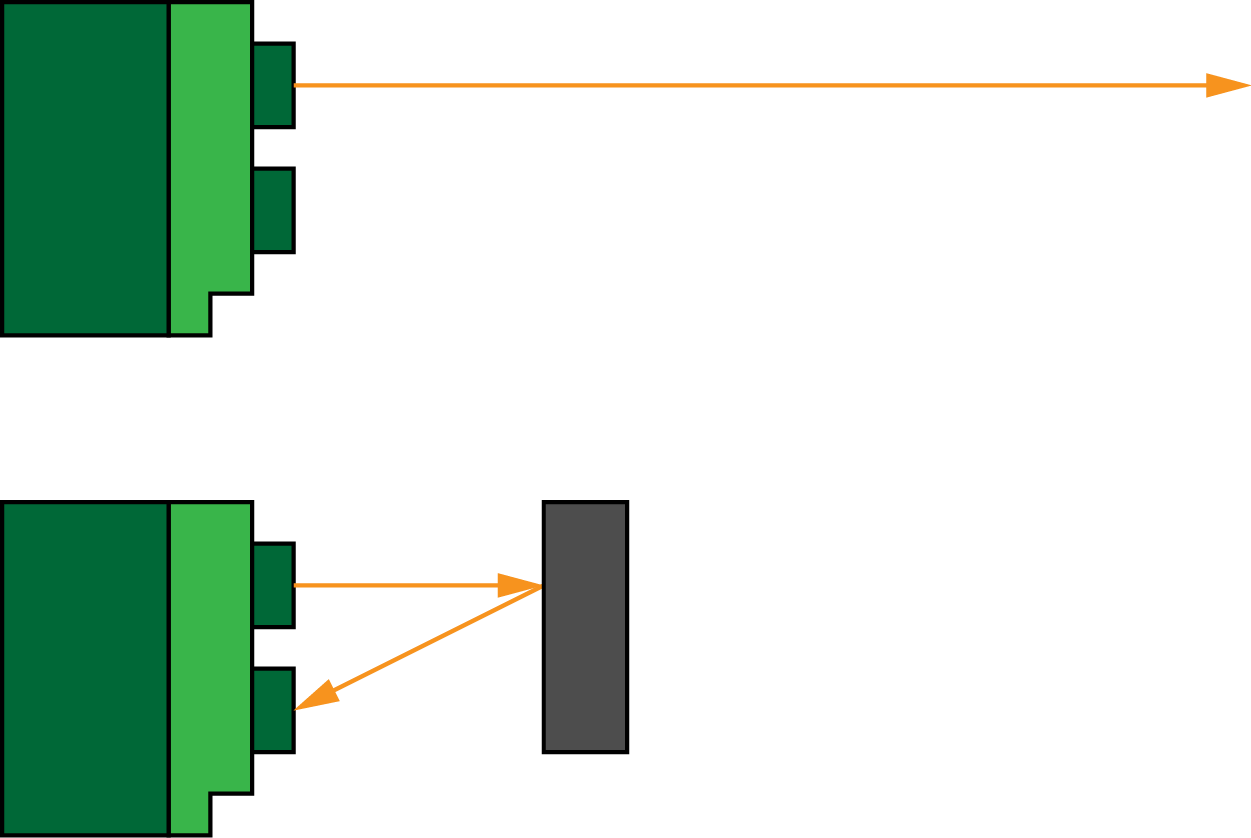
Système proximité : Constitué d’un boitier E-R, la portée dépend de la couleur de l’objet, ne fonctionne pas sur les objets transparents.
Les capteurs analogiques
Les capteurs analogiques étudiés dans ce chapitre sont des capteurs à sortie électrique linéaire, c’est-à-dire directement proportionnelle à la grandeur mesurée en entrée.
Thermocouples
Les thermocouples, ou couples thermoélectriques, sont une famille de capteurs analogiques qui convertissent la température en tension grâce à un phénomène qui s’appelle l’effet Seebeck.
Explication (hors-programme)
Un thermocouple est un ensemble de deux métaux $A$ et $B$ à travers lesquels on applique une différence de température $\Delta T$, cette différence de température crée une tension $U_{A B}$ proportionnelle telle que:
$U_{A B}=S_{A B} \Delta T$
Le couple de métaux étant connu, le coefficient de SEEBECK $S_{A B}$ est donc connu, en conséquent la tension renseigne sur la différence de température.
Sonde RTD
Une sonde RTD est une résistance constituée d'un métal appelé platine $(P t)$. La résistance d'une sonde RTD varie selon la température donc si on connait le courant traversant la résistance $R_{P t}$ et la tension à ses bornes, on peut mesurer $R_{P t}$ et donc d'en déduire la température. Le type de platine le plus utilisé est la platine $P t 100$ qui fournit une résistance de $100 \Omega$ à 0 deg.
Tachymètre
Un tachymètre est un dispositif qui convertit la vitesse de rotation en une tension proportionnelle. Il s’agit de la relation qui a été vue en chaîne d’énergie pour convertir la vitesse en tension :
$E=k_{e} \omega$
Les capteurs numériques de position
Cette partie détaillera deux capteurs numériques qui sont utilisés pour mesurer la position angulaire d’un arbre tournant. Il s’agit d’une solution numérique pour déterminer les angles de rotation et les vitesses de rotation. Le signal d’un capteur numérique peut être soit un train d’impulsions de valeur alternée (True/False) dont le nombre d’impulsions fournit l’information sur l’angle de rotation ou nombre de tours, ou bien une séquence binaire (cf. Traiter).
Codeur optique incrémental
Un codeur optique incrémental est un capteur numérique qui permet de mesurer l’angle de rotation et la vitesse de l’arbre auquel il est relié. Sa composition est la suivante :
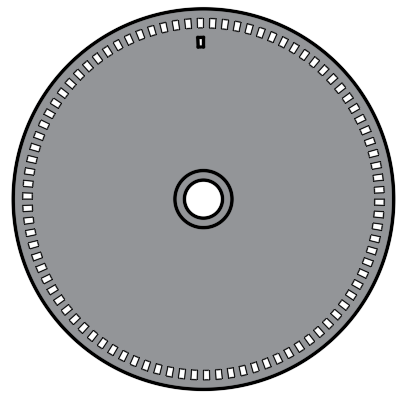
Codeur optique incrérmental.
- La piste A contient $n$ fentes (trous) de taille égale $e$, formant ainsi une alternance trou/obstacle. Le disque tourne à la même vitesse que l'arbre d'entrée.
- La piste B contient 1 fente de même taille que les autres, celle-ci permet le passage du signal chaque fois que le codeur effectue 1 tour.
- La photodiode A1 est placée sur la piste A et envoie un signal au récepteur à chaque $1 / n$ tour.
- La photodiode $\mathrm{B}$ et placée sur la piste B et envoie un signal au récepteur à chaque 1 tour.
- La photodiode A2 est placée sur la piste A et décalée de $\frac{s}{4}$ par rapport à la photodiode A1, celle-ci renseigne sur le sens de rotation de l'arbre.
Caractéristiques d’un codeur incrémental
La résolution d’un codeur incrémental est exactement n, qui est le nombre de trous par tour. (un codeur à 360 trous à une résolution de 360 trous par tour)
En conséquent, la précision d'un codeur incrémental s'agit de l'angle formée par une impulsion (on/off), la précision $\Delta \theta$ est telle que:
$\Delta \theta=\frac{2 \pi}{n}$
L’inconvénient d’un codeur incrémental est que celui-ci ne fournit que la position relative au dernier usage du codeur. Les valeurs de position données ne sont pas absolues.
Codeur binaire absolu
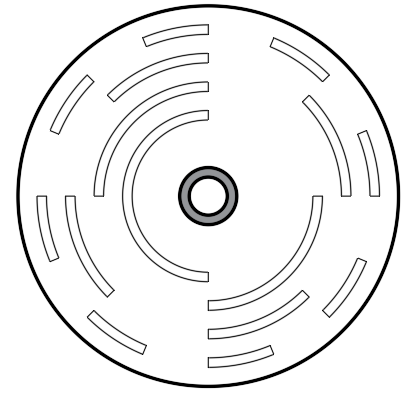
Codeur optique incrérmental.
Un codeur binaire utilise le même principe si ce n’est que les trous de celui-ci sont arrangés de telle sorte à pouvoir acquérir la position angulaire de l’arbre par rapport à un axe de référence.
Un codeur binaire absolu est un disque divisé constitué de $n$ pistes et une rangée de $n$ photodiodes. les pistes sont indexées par $i \in\{1, \ldots, n\}$ de l'intérieur vers l'extérieur. Chaque piste $i$ contient $2^{i-1}$ fentes à espacement régulier.
Si l’on prend l’exemple d’un codeur binaire à 4 pistes. La première piste renseigne la PC sur quel demi-tour se trouve t’on, la deuxième piste renseigne sur le quart de tour où l’on se trouve, la troisième piste le 1/8 de tour, la quatrième sur le 1/16 de tour. Donc la précision et la résolution d’un codeur binaire dépend du nombre de pistes. Il existe deux types de codeurs binaires : le codeur binaire naturel, et le codeur réfléchi. (cf. Traiter)
ما يجب معرفته
Les capteurs, d’après ce qui a été mentionné précédemment, sont les dispositifs qui permettent l’acquisition des données du milieu extérieur.
- Les capteurs passifs : Nécessitent un apport d’énergie de l’extérieur afin de fonctionner. Un capteur passif, s’il est électrique, est modélisé par une impédance Z┬_. Cela veut dire que si on veut un signal à la sortie du capteur, il faut un signal d’entrée.
- Les capteurs actifs : Un capteur est actif lorsque celui-ci ne nécessite pas un apport d’énergie pour fonctionner, l’apport en énergie est auto-assuré.
Connaitre les propriétés générales d’un capteur.
Connaitre les types de capteurs logiques : détecteurs de présence par bouton, capteurs inductifs, capacitifs, magnétiques.
Connaitre les détecteurs photoélectriques et leurs configurations.
Connaitre les types de capteurs analogiques : thermocouples, tachymètre et sonde RTD.
Connaitre le fonctionnement d’un codeur incrémental ainsi que le codeur binaire absolu.
$\Delta \theta=2 \pi / \mathrm{n}$
Le conditionnement
Situation de conditionnement
L’étape qui suit l’acquisition s’agit du conditionnement. C’est le passage où la grandeur acquise est adaptée de telle sorte à pouvoir être lue, traitrée et manipulée dans les limites de fonctionnement des dispositifs de traitement. Le conditionnement se fait selon 3 étapes centrales, moyennant le diagramme SADT A-0 suivant :
Le complexe de conditionnement récupère le signal acquis et en extrait une information directement exploitable par l’unité de traitement. Cette étape selon les considérations suivantes :
- Amplifier le signal.
- Filtrer le signal.
- Échantillonner le signal.
- Bloquer le signal.
- Convertir le signal.
Amplification et filtrage
Amplification
L’amplification est l’opération qui consiste à prendre un signal (généralement électrique) et lui augmenter l’amplitude sans modifier les facteurs de forme qui pourrait changer le signal (fréquence et phase). Cette manipulation se fait avec un composant électronique qui s’appelle amplificateur opérationnel.
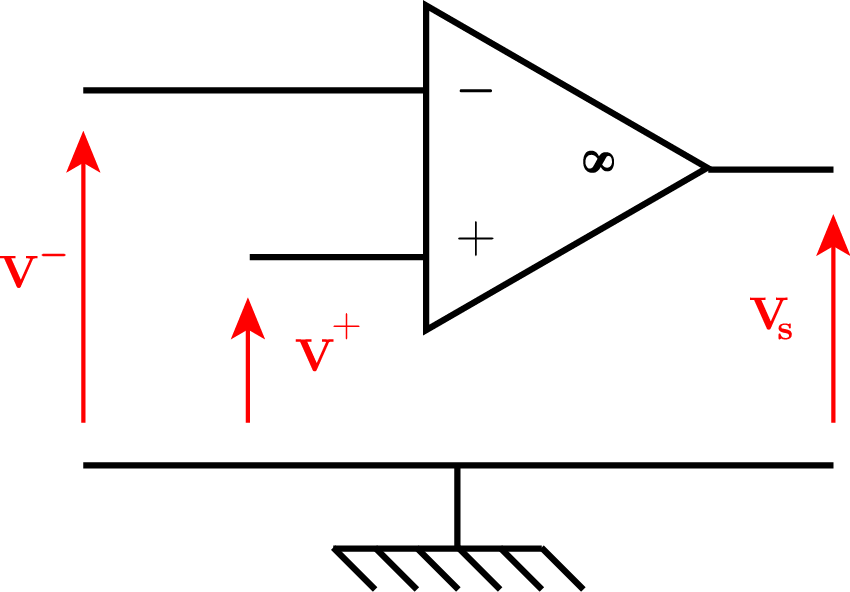
Amplificateur opérationnel.
Cet amplificateur opérationnel fonctionne généralement comme un comparateur. c'est à dire qu'en fonctionnement normal, il prend en entrée deux entrées $V^{+}$et $V^{-}$et donne en sortie une valeur $\pm V_{c c}$ qui dépend du signe de $e=V^{+}-V^{-}$.
Donc en principe, l’AOP est un comparateur logique, mais en branchant la sortie à l’entrée −, on obtient un filtre dont la tension de sortie est une opération arithmétique des tensions d’entrée (addition, soustraction, dérivation, intégration, exponentiation, logarithme) que l’on peut utiliser pour obtenir des signaux à la guise. Nous présentons deux montages ainsi que l’expression de la tension de sortie en fonction de la tension d’entrée.
Quelques exemples de montages avec amplificateur opérationnel
Exemple 1

Exemple 2
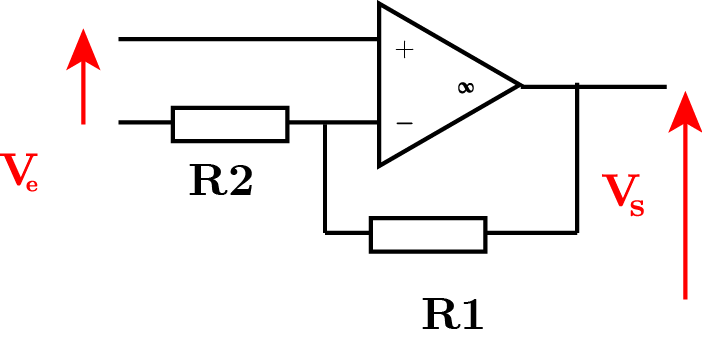
$V_{s}=\left(1+\frac{R_{1}}{R_{2}}\right) V_{\varepsilon} \quad V_{s}=-\frac{R_{1}}{R_{2}} V_{e}$
Filtrage
Le filtrage est l’opération qui consiste à prendre un signal (généralement électrique alternatif) et éliminer les fréquences dans le signal qui ne nous intéressent pas ou qui peuvent constituer un bruit. Cette opération de filtrage se base sur un principe mathématique qui dit que tout signal $e(t)$ périodique peut être écrit comme une somme infinie de signaux sinusoidaux :
$e(t)=\sum_{k=1}^{+\infty} A_{k} \sin \left(2 \pi f_{k} t+\varphi_{k}\right)$
Et donc un filtre est un circuit électrique qui prend en entrée le signal $e(t)$ et enlève les termes qui contiennent les fréquences $f_{k}$ qu'on désire éliminer.
Types de filtres usuels
Les filtres usuels qu'on retrouve sont des filtres à bande passante, c'est-à-dire qu'il possèdent un intervalle de fréquences $\left[f_{\min }, f_{\max }\right]$ et tout signal ayant des fréquences hors bande-passante est éliminé.
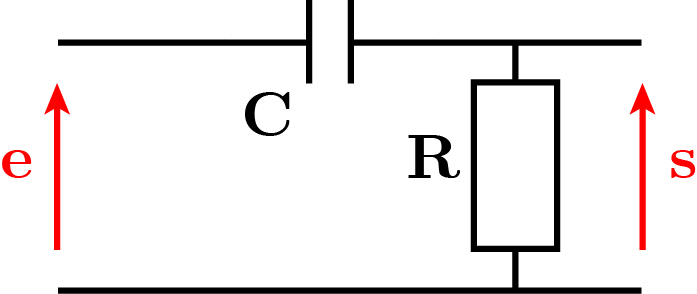
- Filtre passe-bas d'ordre 1 : Il s'agit d'un circuit RC qui travaille comme filtre de bande passante $\left[0, f_{R C}\right]$ où
$f_{R C}=\frac{1}{2 \pi R C}$
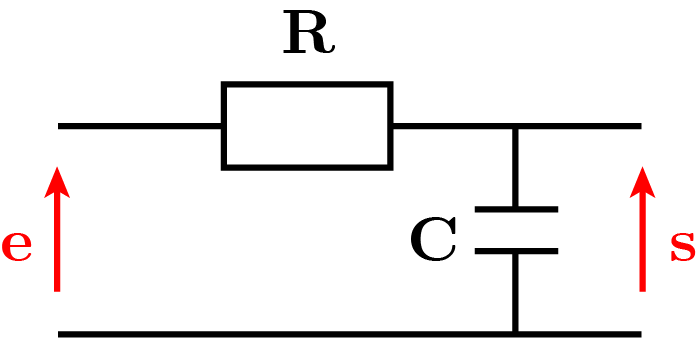
Filtre passe-bas.
- Filtre passe-haut d'ordre 1 : Il s'agit d'un circuit RC qui travaille comme filtre de bande passante $\left[f_{R C},+\infty[\right.$ où
$f_{R C}=\frac{1}{2 \pi R C}$
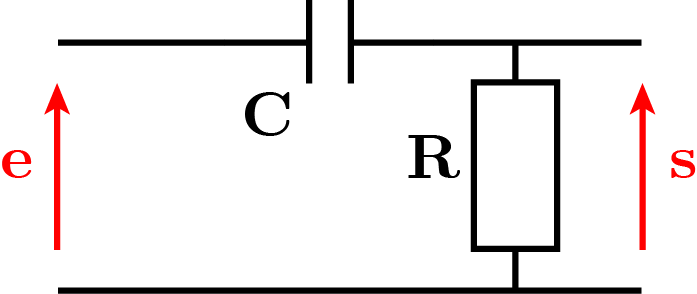
Filtre passe-haut.
- Filtre passe-bande d'ordre $2:$ Il s'agit d'un circuit RLC qui travaille comme un filtre de bande passante $\left[f_{\min }, f_{\max }\right]$ telle que:
$f_{\max }-f_{\min }=\Delta f=\frac{1}{2 \pi} \frac{L}{R}$ - Sa fréquence de résonance centrale est :
$f_{0}=\frac{1}{2 \pi \sqrt{L C}}$
Filtre passe-bande.
Conversion CAN
La conversion CAN est une opération qui consiste à prendre en entrée un signal analogique $s(t)$ sur un intervalle continu $[a, b]$ et le convertir en un signal numérique $s_{n}$ échantillonné sur un intervalle $\Delta t$ constant. Cette opération se fait en trois étapes :
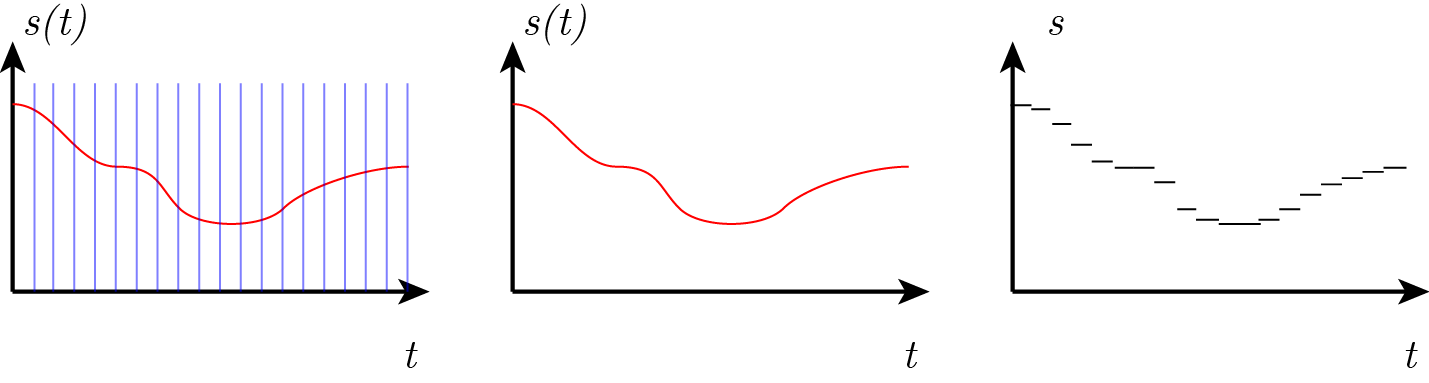
Conversion analogique-numérique.
- Échantillonnage : Cette opération consiste à prélever la valeur du signal à un pas $\Delta t$ (appelé période d'échantillonnage) constant fixé par le convertisseur.
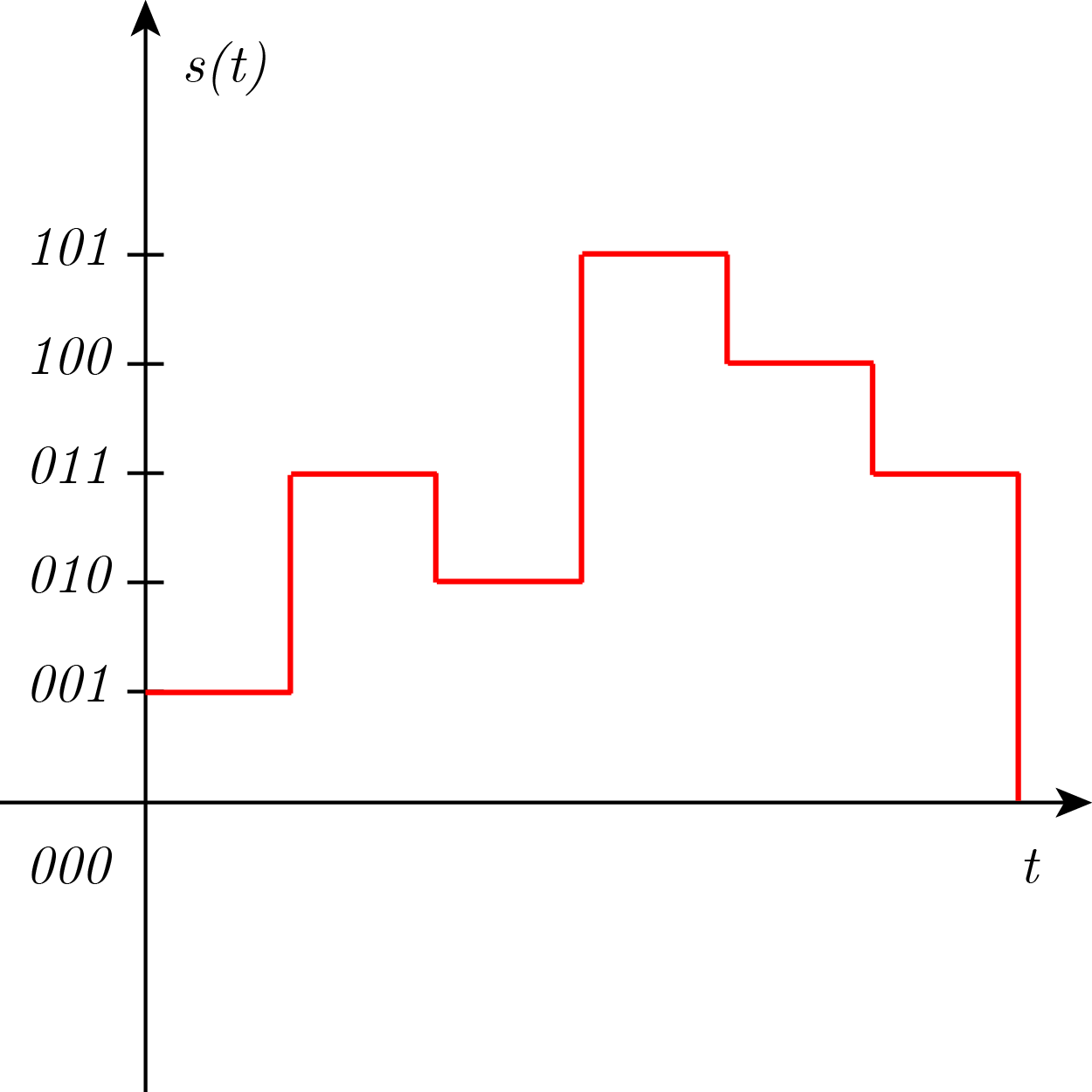
- Bloquage: Cette opération consiste à affecter à chaque intervalle de longueur $\Delta t$ une valeur de sortie constante, en vue d'obtenir une fonction en escaliers.
- Quantification : Cette étape consiste à affecter à chaque échantillon une valeur de sortie binaire. (cf traiter).
Convertisseur CAN
Un convertisseur CAN possède un ensemble de caractéristiques qui sont :
- Le nombre de bits de sortie n du convertisseur.
- Le pas de conversion q qui est la plus petite variation de sortie quantifiable.
- Les tensions de référence qui permettent d’établir l’intervalle de sortie du signal analogique.
- Le temps de conversion.
Conversion CNA
Un convertisseur CNA effectue l’opération inverse, il convertir un signal numérique en un signal analogique, ses caractéristiques sont :
- Le nombre de bits à convertir.
- La plage de conversion entre les valeurs numériques et analogiques.
- Le temps de conversion de chaque grandeur numérique.
- Le pas de conversion.
ما يجب معرفته
Le complexe de conditionnement récupère le signal acquis et en extrait une information directement exploitable par l’unité de traitement. Cette étape selon les considérations suivantes :
- Amplifier le signal.
- Filtrer le signal.
- Échantillonner le signal.
- Bloquer le signal.
- Convertir le signal.
Conversion analogique-numérique :
Échantillonnage : Cette opération consiste à prélever la valeur du signal à un pas $\Delta \mathrm{t}$ (appelé période d'échantillonnage) constant fixé par le convertisseur.
Blocage : Cette opération consiste à affecter à chaque intervalle de longueur $\Delta t$ une valeur de sortie constante, en vue d'obtenir une fonction en escaliers.
Quantification : Cette étape consiste à affecter à chaque échantillon une valeur de sortie binaire.
Fonction traiter
Pour continuer cette fiche de cours, Inscris-toi gratuitement sur Kezakoo

- Fiches de cours illimitées
- Une vidéo gratuite par leçon
- 2 exercices gratuits par leçon
- Un test gratuit par leçon