-

-
Sciences de l'ingénieur
Fonction Convertir
2ème année bac Sciences Math B SI Fonction Convertir fiche de cours
Introduction, classification des actionneurs
Une fois l’énergie distribuée à travers les systèmes de distriubtion (préactionneurs), elle parvient aux convertisseurs afin de convertir cette énergie transférée à une énergie utilisable par la partie opérative.
Objectifs
Se familiariser et bien définir la notion de conversion; Classifier les actionneurs selon le type d’énergie distribuée.
Convertir
Une fois l’énergie délivrée par les préactionneurs, il faut maintenant convertir celle-ci afin de pouvoir être utilisée par les éléments d’action. La troisième étape de la chaîne d’énergie consiste donc à convertir l’énergie. La conversion se définit comme suit;
تعريف
Les composants qui s’occupent de cette étape s’appellent des actionneurs. La fonction globale d’un actionneur est donc de convertir une énergie X en une énergie Y, l’énergie X étant la matière d’oeuvre d’entrée et l’énergie Y étant la matière d’oeuvre de sortie.
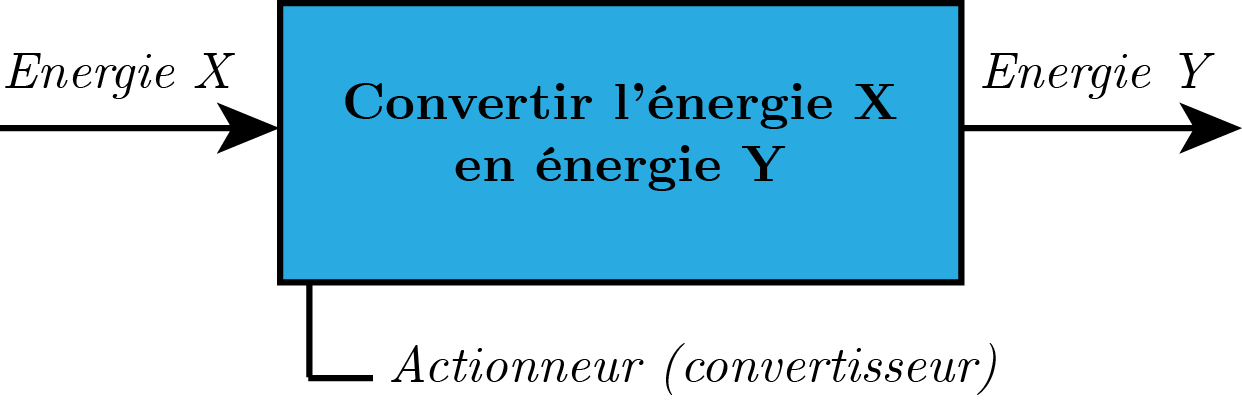
A-0 d’un Actionneur
Classification des actionneurs
Les actionneurs qui font l’objet de ce programme ont pour point commun l’énergie de sortie; c’est-à-dire que les actionneurs qui seront étudiées convertissent une énergie X en énergie mécanique. De plus, il existe plusieurs types d’actionneurs, parmi ceux-ci on trouve des actionneurs électriques et des actionneurs pneumatiques.
Actionneurs électriques : moteurs
Les moteurs électriques sont des actionneurs électriques qui convertissent l’énergie électrique en une énergie mécanique, généralement de rotation. Parmi les moteurs électriques, on trouve :
- Les moteurs à courant continu (MCC ou MDC);
- Les moteurs asynchrones (MAS monophasés ou triphasés);
- Les moteurs synchrones (MS);
- Les moteurs universels;
- Les moteurs pas-à-pas.
Actionneurs pneumatiques : vérins
Les vérins pneumatiqes sont des actionneurs pneumatiques qui convertissent l’énergie pneumatique en une énergie mécanique, généralement de translation. Il existe deux types de vérins :
- Les vérins simple effet (analogues aux distributeurs monostables);
- Les vérins double effet (analogues aux distributeurs bistables).
ما يجب معرفته
Convertir, c’est transfomer une énergie non utilisable directement, en une énergie utilisable directement par un agisseur ou un transmetteur. Les moteurs électriques sont des actionneurs électriques qui convertissent l’énergie électrique en une énergie mécanique, généralement de rotation. Parmi les moteurs électriques, on trouve :
- 1.Les moteurs à courant continu (MCC ou MDC);
- 2.Les moteurs asynchrones (MAS monophasés ou triphasés);
- 3.Les moteurs synchrones (MS);
- 4.Les moteurs universels;
- 5.Les moteurs pas-à-pas.
Les vérins pneumatiqes sont des actionneurs pneumatiques qui convertissent l’énergie pneumatique en une énergie mécanique, généralement de translation. Il existe deux types de vérins :
- Les vérins simple effet;
- Les vérins double effet.
Moteur à courant continu - MCC
Un moteur à courant continu (MCC) prend comme entrée l’énergie électrique de type DC et la convertit en énergie mécanique de rotation.
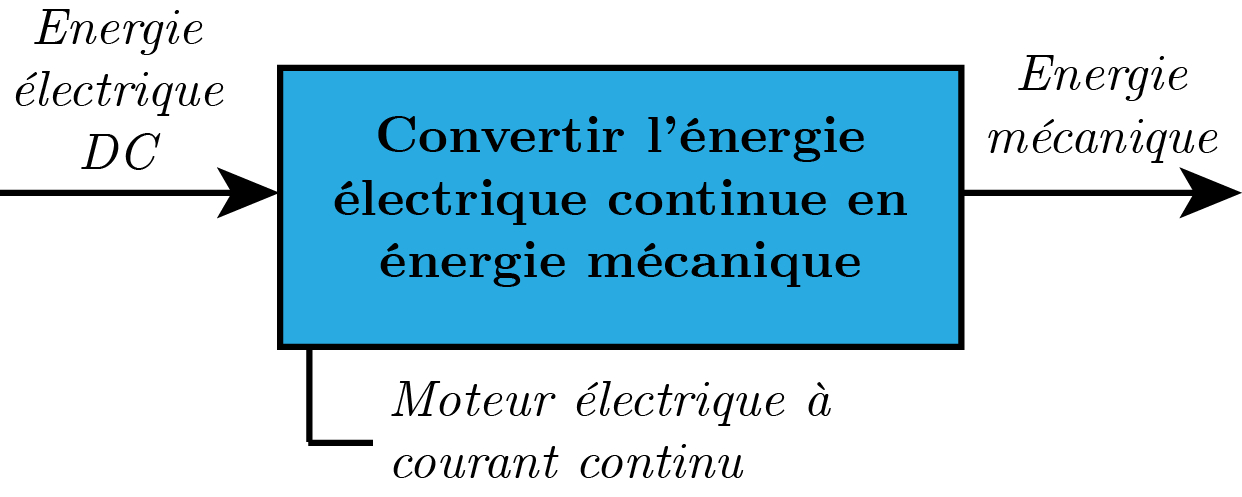
A-0 d’un MCC
Principe d’un MCC : Force de Laplace
Le fonctionnement d’un moteur à courant continu consiste à alimenter un circuit électrique (constitué de bobines) avec un courant constant I, le circuit se trouvant à côté d’un aimant permanent, l’existence de I et du champ magnétique B provoque l’apparition des forces de Laplace moyennant l’équation suivante :
$\vec{F}_{L}=I \vec{u} \times \vec{B}$
Où $\vec{u}$ est un vecteur unitaire qui désigne la direction des fils du circuit électrique. Une bonne disposition des bobines permet l’apparition d’un couples de forces qui engendre un moment sur le rotor, ce qui le fait tourner.
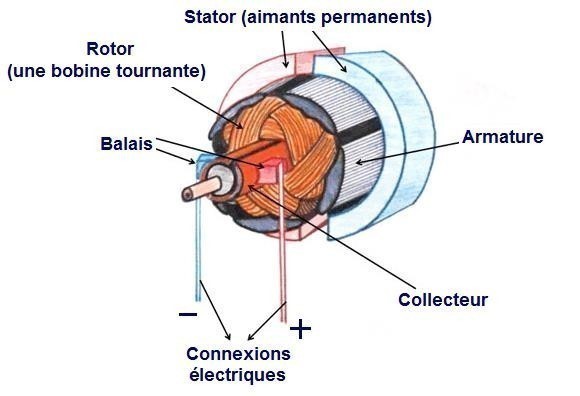
Vue de l’intérieur d’un MCC; le rotor une fois alimenté en électricité, fait apparaître un couple électromagnétique C qui crée une vitesse de rotation $\omega$.
Un moteur à courant continu est donc caractérisé par sa tension d’alimentation U, sa puissance nominale P et sa vitesse de rotation nominale $\omega$ ou N. N.B. : La vitesse de rotation (ou fréquence de rotation) peut être exprimée de deux manières :
- Soit avec l’unité rad/s et auquel cas elle est notée $\omega$;
- Soit avec l’unité tr/min et auquel cas elle est notée N.
La conversion entre $\omega$ et N se fait avec la formule suivante :
$\omega=\frac{2 \pi}{60} N=\frac{\pi}{30} N \simeq 0.10472 \cdot N$
Caractéristiques d’un MCC
Schéma électrique équivalent d’un MCC
Un moteur à courant continu peut être représenté dans un circuit comme suit :
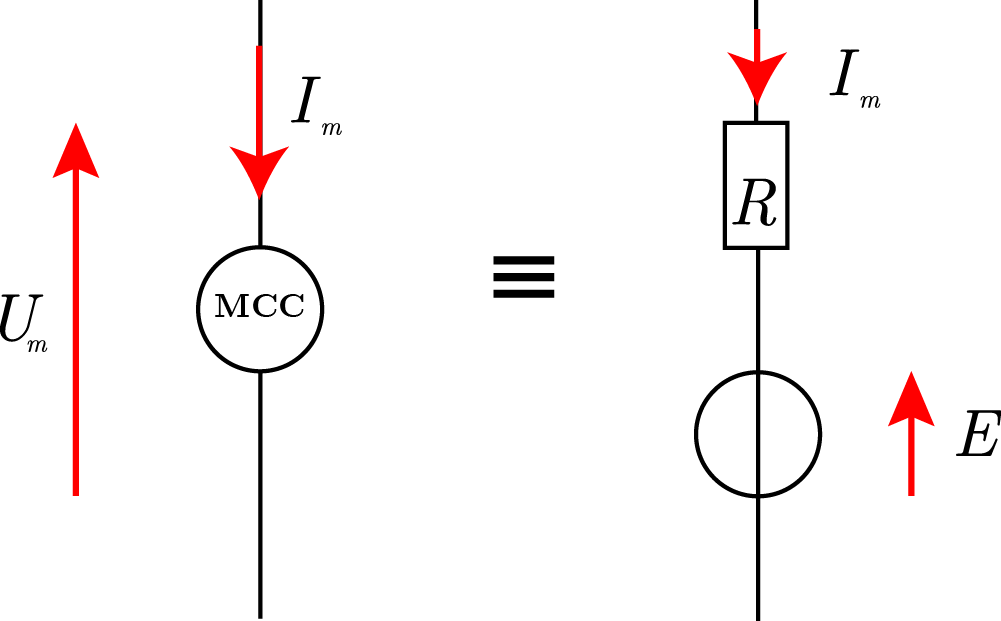
Un moteur à courant continu est représenté par un générateur de tension E en convention récepteur, en série avec une résistance R.
La tension aux bornes d’un moteur à courant continu s’écrit donc comme suit :
$U_{m}=E+R I_{m}$
La vitesse de rotation du moteur provient de la force électromotrice E à travers la relation suivante :
$E=k_{E} \omega$
Où $k_{E}$ est une constante de conversion fournie par le constructeur, elle s’exprime en $\mathrm{V} \cdot \mathrm{s} / \mathrm{rad} .$
Le couple électromagnétique de Laplace provient du courant dans l’induit $I_{m}$ à travers la relation suivante :
$C=k_{I} I_{m}$
Où $k_{I}$ est une constante de conversion fournie par le constructeur, elle s’exprime en $N . \mathrm{m} / \mathrm{A} .$
Puissance, rendement et pertes
Un moteur à courant continu est alimenté par une tension U et (donc) un courant I. La puissance totale absorbée par le moteur, notée $P_{a}$, s’écrit donc : $P_{a}=U I$ Le moteur n’étant pas une machine idéale, la puissance délivrée par celui-ci sera inférieure à la puissance absorbée compte tenu des pertes de puissances durant tout le processus de conversion d’énergie. La puissance délivrée par le moteur est appelée puissance utile, notée $P_{u}$, elle s’écrit ainsi : $P_{u}=C \omega$
Rendement de puissance
Comme cité précédemment, la puissance utile est la partie de la puissance absorbée qui est délivrée par le moteur, en notant ΔP les pertes de la puissance, on déduit donc la relation entre $P_{a}$ et $P_{u}$ :
$P_{u}=P_{a}-\Delta P$
On définit le rendement, noté , comme étant le rapport entre la puissance utile et la puissance totale :
$\eta=\frac{P_{v}}{P_{z}}$
Sans unité, il est généralement exprimé en pourcentage et est toujours inférieur à 1 (100%) dans la réalité, le rendement s’écrit aussi :
$\eta=1-\frac{\Delta P}{P_{\alpha}}=\frac{P_{v}}{P_{u}+\Delta P}=\frac{1}{1+\frac{\Delta}{P_{u}}}$
Pertes de puissance
Comme le moteur n’utilise qu’une partie de la puissance fournie, les pertes de puissance prennent plusieurs formes :
- Les pertes résistives, ou pertes par effet Joule, qui s’écrivent comme suit : $\Delta P_{j}=R I^{2}$
- Les autres : généralement des pertes de puissance d’origine mécanique (frottements, vibrations etc.) et magnétiques dont les valeurs sont expérimentales et/ou données par le constructeur.
On a donc :
- Pertes par effet Joule au stator, exprimés comme $P_{j s}=R_{s} I^{2}$ où $R_{s}$ est la résistance équivalente au niveau du stator.
- Pertes magnétiques (appelées "pertes fer") $P_{f s}$ proportionnelles au carré de la tension et qui apparaissent dans les éléments magnétisés.
- Pertes par effet Joule au rotor; exprimés comme $P_{j r}=R_{r} I^{2}$ où $R_{r}$ est la résistance équivalente au niveau du rotor.
- Pertes mécaniques $P_{m}$ dues aux frottements et aux vibrations, aérations etc.
Contrôle d’un MCC
Un MCC est contrôlé de par sa vitesse de rotation. Celle-ci est commandée à travers un variateur de vitesse (cf. Distribuer), un variateur de vitesse se base sur le principe que la vitesse de rotation est proportionnelle à la tension appliquée à ses bornes. Donc varier la vitesse revient à varier la tension d’alimentation. Il existe deux solutions dans ce sens là : On utilise soit un redresseur commandé à tension variable, soit un hacheur.
Sens de rotation d’un MCC
En principe le sens de rotation d’un MCC est contrôle par le sens de passage du courant électrique.
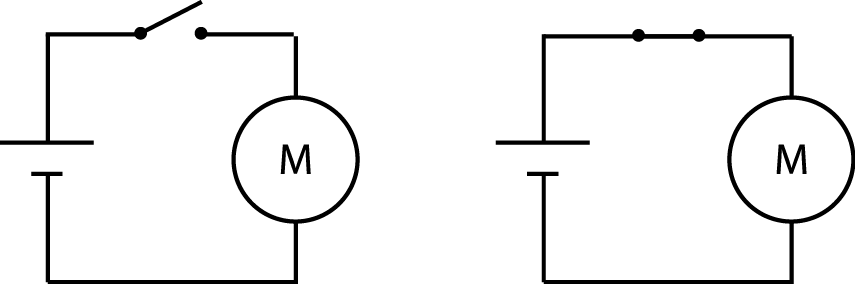
Moteur au repos à gauche, moteur en rotation dans un seul sens à droite.
Afin de faire changer le sens de rotation d’un MCC, il faut contrôler le sens de passage du courant à travers la disposition d’un pont de 4 interrupteurs comme suit :
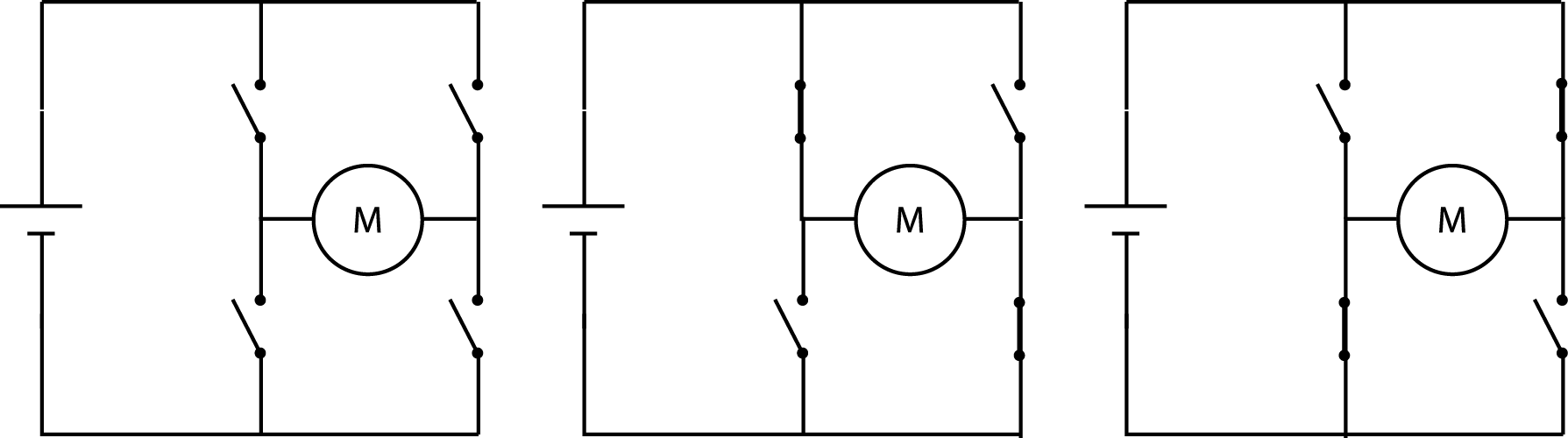
Moteur au repos à gauche, moteur en rotation dans un sens au centre et moteur en rotation dans l’autre sens à droite.
Hacheur
Un hacheur est un dispositif qui transforme une tension continue Ve en une tension alternative rectangulaire Vs qui prend l’allure suivante : Le principe de base d’un hacheur repose sur l’ouverture et la fermeture périodique d’un interrupteur qui permet de définir une période d’oscillation T telle que :
$T=T_{\text {on }}+T_{\text {off }}$
Où Ton est le temps de passage de la tension et Toff le temps d’interruption de la tension. On définit le Rapport cyclique comme étant :
$\alpha=\frac{T_{\mathrm{se}}}{T}$
La valeur moyenne en sortie est exactement :
$V_{\text {moy }}=\alpha V_{\varepsilon}$
On en déduit que l’on peut contrôler la tension de sortie en contrôlant le cycle d’ouverture/fermeture du circuit du hacheur (et donc de ). Les interrupteurs en soi sont des transistors (cf. vidéo cours)
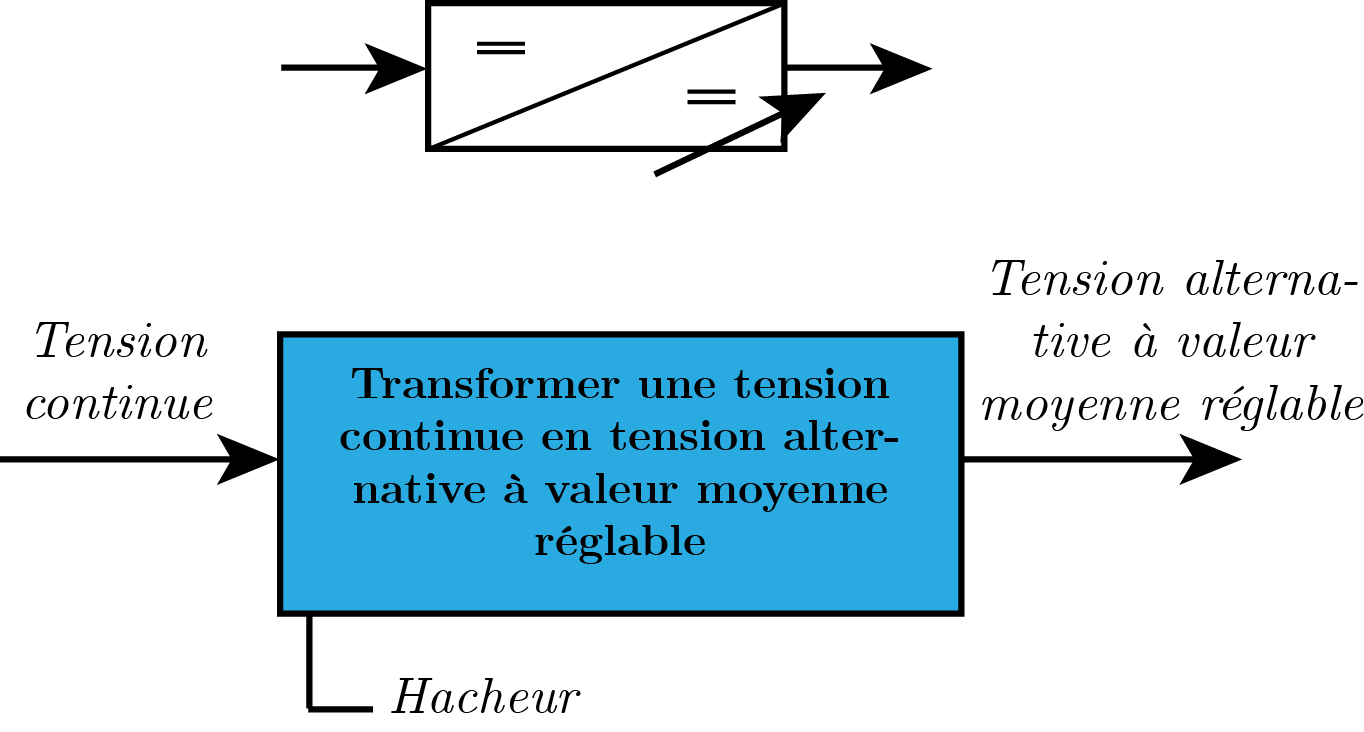
Schéma et fonction d’un hacheur
Redresseur commandé à tension variable
Le redresseur commandé à tension variable fonctionne de la même manière qu’un hacheur si ce n’est que la tension d’entrée est cette fois-ci alternative sinusoïdale de valeur moyenne nulle.
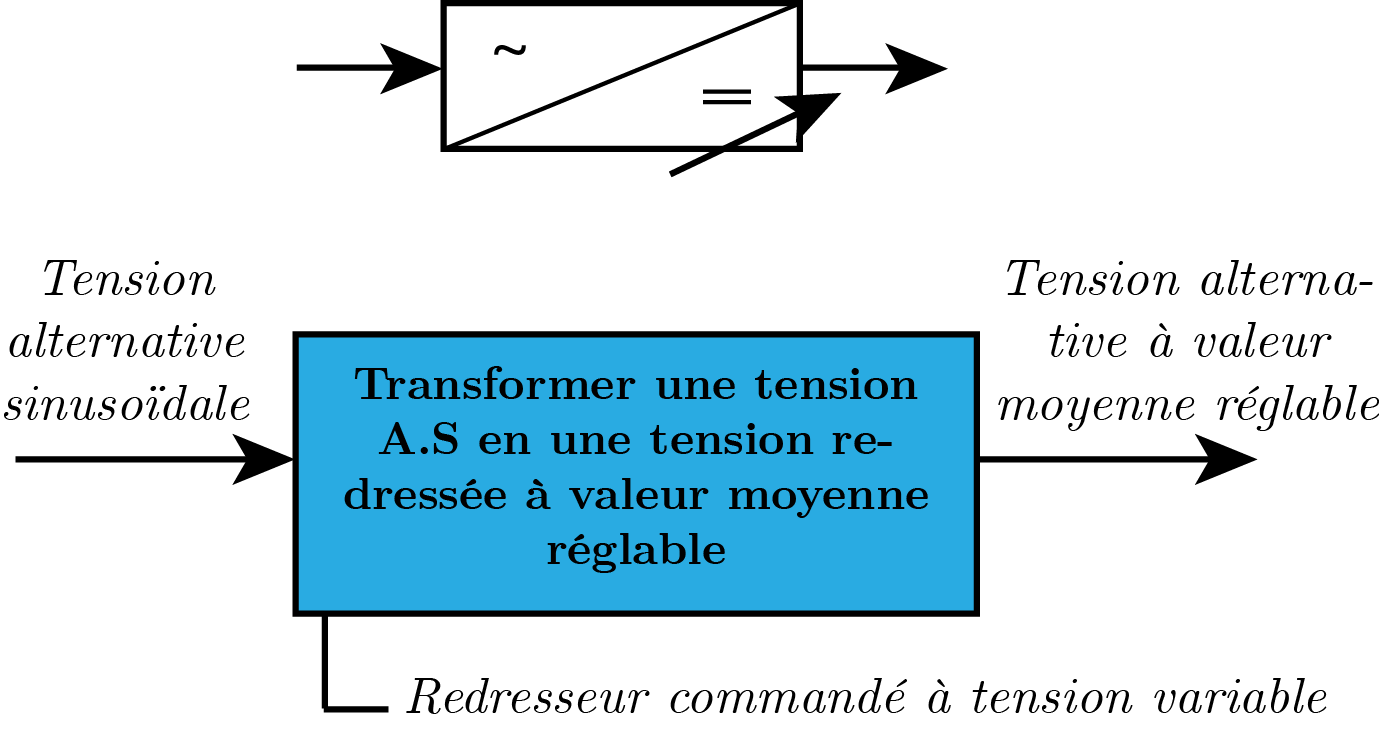
Schéma et fonction d’un redresseur commandé à tension variable
Le schéma d’un redresseur commandé est le même que celui d’un pont de Graëtz (cf. Alimenter), la seule différence étant que deux de ces diodes sont en réalité des thyristors. (cf. vidéo cours)
Informations sur le MCC, utilisation des MCC
Les MCC sont généralement utilisés dans le domaine des instruments électrique à faible puissance, généralement dans les jouets, le micro-outillage et la robotique à petite échelle. Ils sont utilisés principalement pour leur capacité à fournir une vitesse stable en fonction de la charge fournie. La variation de vitesse se fait de manière directe et rapide. Le couple délivré par le MCC dépend des paramètres de construction et conception du bobinage, il en suit donc que le nombre d’enroulements et le serrage du flux magnétique sont des paramètres qui contrôlent de couple moteur. L’inconvénient majeur, et la raison pour laquelle il est largement utilisé dans le domaine de faible puissance est la liaison balai/collecteur (voir schéma précédent) qui s’use au fur et à mesure que l’on utilise le moteur pour des vitesses élevées (problème de frottement).
ما يجب معرفته
La conversion entre et N se fait avec la formule suivante :
$\omega=\frac{2 \pi}{60} N=\frac{\pi}{30} N \simeq 0.10472 \cdot N$
La tension aux bornes d’un moteur à courant continu s’écrit donc comme suit :
$U_{m}=E+R I_{m}$
La vitesse de rotation du moteur provient de la force électromotrice E à travers la relation suivante :
$E=k_{E} \omega$
Où $k_{E}$ est une constante de conversion fournie par le constructeur, elle s’exprime en V.s/rad.
Le couple électromagnétique de Laplace provient du courant dans l’induit $I_{m}$ à travers la relation suivante :
$C=k_{I} I_{m}$
Où $k_{I}$ est une constante de conversion fournie par le constructeur, elle s’exprime en $N \cdot m / A$.
$P_{a}=U I$
$P_{u}=C \omega \quad(W)$
On définit le rendement, noté $\eta$, comme étant le rapport entre la puissance utile et la puissance totale :
$\eta=\frac{P_{v}}{P_{a}}$
Un hacheur est un dispositif qui transforme une tension continue $V_{e}$ en une tension alternative rectangulaire.
Le principe de base d’un hacheur repose sur l’ouverture et la fermeture périodique d’un interrupteur qui permet de définir une période d’oscillation T telle que :
$T=T_{\text {on }}+T_{\text {off }}$
Où $T_{\text {on }}$ est le temps de passage de la tension et $T_{\text {off }}$ le temps d’interruption de la tension. On définit le Rapport cyclique comme étant : $\alpha=\frac{T_{\mathrm{s}}}{T}$
La valeur moyenne en sortie est exactement : $V_{m o y}=\alpha V_{e}$
Le redresseur commandé à tension variable fonctionne de la même manière qu’un hacheur si ce n’est que la tension d’entrée est cette fois-ci alternative sinusoïdale de valeur moyenne nulle.
Moteur asynchrone
Pour continuer cette fiche de cours, Inscris-toi gratuitement sur Kezakoo

- Fiches de cours illimitées
- Une vidéo gratuite par leçon
- 2 exercices gratuits par leçon
- Un test gratuit par leçon